Soft robotics in medicine
We are developing new soft robots at different scales and with innovative features such as the catheters shown below. Our research focuses on:
- The design and integration of millimeter-scale magnetic catheters
- The implementation of feedback control strategies for their manipulation
- The development of localization methods for intra-body navigation
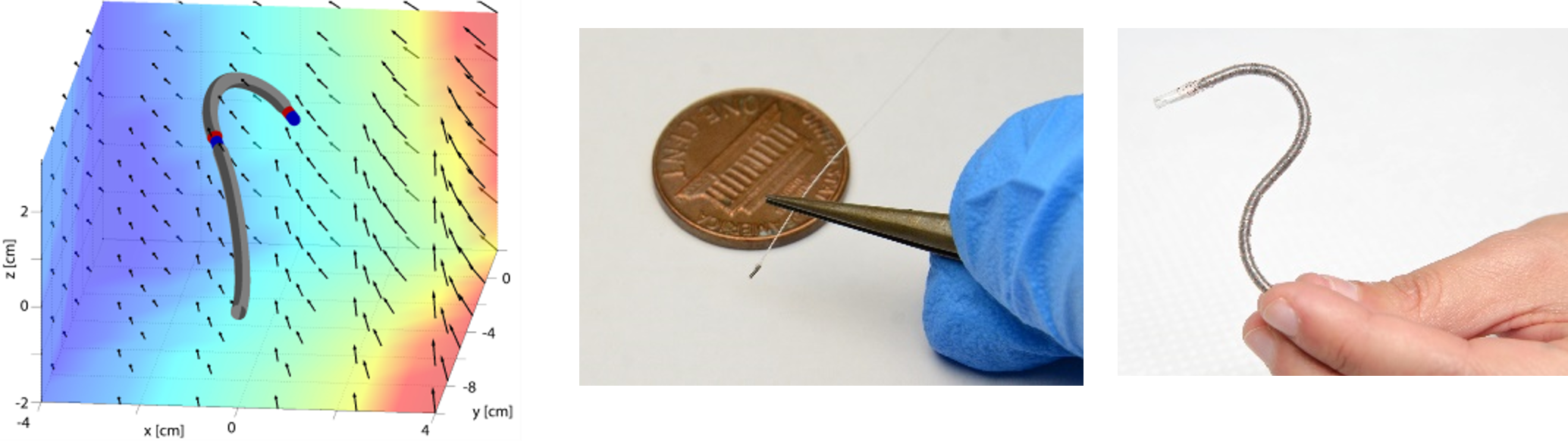
Example of our magnetic tools for robotics in medicine
We are targeting several medical applications that benefit from our technologies as described in the figure below.

Targeted medical applications
In a cardiac arrhythmia ablation procedure, the diseased tissue that causes the arrhythmia is isolated or destroyed by RF ablation.
Age-related macular degeneration and diabetic retinopathy are diseases which affect the retina, the light-sensitive membrane that lines the back of the eye that is responsible for vision.
As one of the most important organs in our body, the brain generates and controls movement and receives, integrates, and interprets sensory information.