Intraocular Visual Servoing
Future retinal therapies will be partially automated in order to increase the surgeons' ability to operate near the sensitive structure of the human eye retina. Untethered robotic devices that achieve the desired precision have been proposed, but require localization information for their control. Since the interior of the human eye is externally observable, vision can be used for localization. We are investigating methods that allow high quality imaging of the posterior of the human eye, and develop algorithms for intraocular device tracking and localization.
Intraocular Imaging
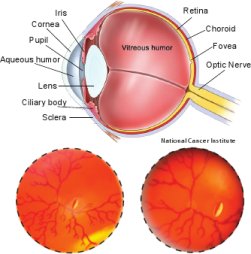
Ophthalmic observation and surgery have been practiced for centuries, and clinicians have the ability to acquire high-definition and magnified images of the interior of the eye using an ever-increasing variety of optical tools that are designed specifically for the unique optical system that is the human eye. However, there is no prior work that explains the effects of the optics of the human eye on the localization of intraocular objects. The cornea, aqueous humor, pupil, intraocular lens, and vitreous humor limit the field-of-view, affect the formation of images.
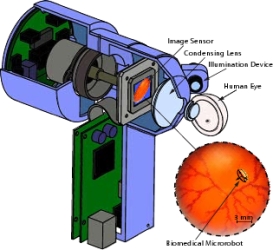
Based on the principles of indirect ophthalmoscopy, we have developed a Mechatronic Vitreoretinal Ophthalmoscope that can image the full human retina. Moreover, this ophthalmoscope can be used to focus on objects moving in the posterior of the human eye.
Tracking Intraocular Microdevices
In order to perform successful ophthalmic surgeries using microdevices, the microdevice should be accurately segmented from the interior of the eye. The optical elements of the human eye however, make the use of additional ophthalmic lenses necessary for intraocular imaging. Keeping intraocular objects constantly in focus is challenging, and the captured images are often blurry and noisy. The unstructured illumination that reaches the interior of the eye, either through transpupilary or transscleral means, can deteriorate the images with uneven brightness and backreflections. Moreover, the microtools that operate in the human eye are generally specular, and have no distinctive color features. Due to the noisy nature of the images, edge based algorithms do not operate well.
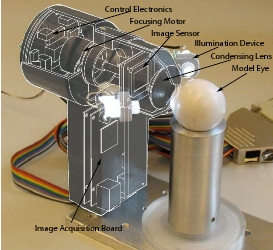
The developed ophthalmoscope can be used in order to track intraocular microdevices based on trained color histograms. We have proposed a method for colorspace evaluation in biomedical applications, succeeded by maximum-separability thresholding. A real-time tracker in the appropriate colorspace guarantees successful segmentation of the microrobot. Our algorithm has been tested in a microrobot moving in a model eye, and we want to examine its potential ex vivo.
Tracking


Localizing Intraocular Microdevices
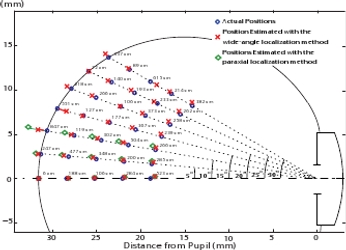
The interior of the human eye is externally observable. As a result, vision and images can be used in order to localize intraocular agents. The way that the images are formed however, is significantly different from the commonly used perspective projection model. As a result, typical computer vision approaches for localization fail. We are investigating localization-from-focus methods for localization. These methods do not require a geometric model of the object of interest, but only knowledge of the full optical system. From biometric measurements, the optics of the human eye can be modeled. The ophthalmic lenses that are needed can be custom made, so that their parameters are known as well. The techniques that we are proposing need not be considered only for microrobot localization, but are applicable for any type of foreign bodies.
After having examined algorithm for paraxial localization from focus, we have now proposed a wide-angle intraocular localization algorithm. In the future, we will develop a 6-DOF pose estimation algorithm that can operate in arbitrary optical system. We are demonstrating the effectiveness of our algorithms by experiments in a model eye.
Localization
Group Members
Prof. Bradley J. Nelson:
Former Group Members
Christos Bergeles, Dr. Bradley E. Kratochvil, Prof. Jake J. Abbott