MRI-based Tracking in 3D Magnetic Steering Systems
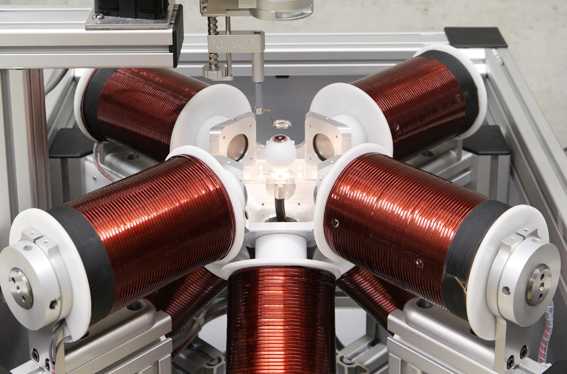
Different electromagnetic control systems have been developed in our lab. These systems consist of a number of electromagnets arranged around a workspace. They are capable of full 3D control (position and orientation) of a magnetic agent by generating magnetic fields and gradients within the workspace.
The systems are used for a large variety of applications. The operating principle is scalable over a large range and allows control of nano-sized objects to millimeter-sized robots. The goal is to use different kinds of robots for mainly medical applications ranging from drug delivery in single cells to eye surgery.
The manipulation systems can be operated open loop and closed loop based on visual feedback. While this is feasible for in vitro applications, it does not work for applications in an enclosed space like the human body. Hence, other methods of tracking are required.
The Principle of MRI
One possibility is to use the magnetic fields the system can generate based on the principle of magnetic resonance imaging (MRI). MRI is a widely used medical imaging technique, allowing 3D imaging of biological tissue (mainly water and fat) in a non-invasive way.
MRI is based on the quantum property of the spin of 1/2, which is characteristic to hydrogen (as well as some other elements). This property is a magnetic moment that has two states when the element placed in a magnetic field: parallel or anti-parallel to the field, also called spin-up and spin-down, respectively. The transition between the two states can be driven by radio frequency (RF) electromagnetic radiation of a given energy proportional to the applied field. The spins return to the initial state of equilibrium after this transition. During that so-called relaxation, they emit an electromagnetic signal, which can be measured. The intensity of that measurement is then proportional to the amount of material in the sample.
If a magnetic field gradient is applied on top of the main magnetic field, the spins distributed in the sample donÕt ÒseeÓ the same magnetic field. Therefore, they emit a different signal based on their position within the sample. Using a given measurement sequence, the measured signals can be resolved into a 3D distribution of the material.
Implementation in the Manipulation System
Our manipulation systems are capable of generating magnetic fields and gradients, which can be used for MRI as well. Additionally, transmission and read-out of RF electromagnetic radiation has to be implemented.
The 3D position of a robot can then be tracked by acquiring a magnetic resonance image. Since both manipulation and tracking use the same magnetic fields, they cannot be performed simultaneously but only sequentially. However, the implementation of MRI-based tracking will open up a large variety of in vivo applications.